Lukáš Doktor
Vzduchový výtah
Cílem projektu je vytvořit výtah poháněný větráčkem z PC.
Pomůcky
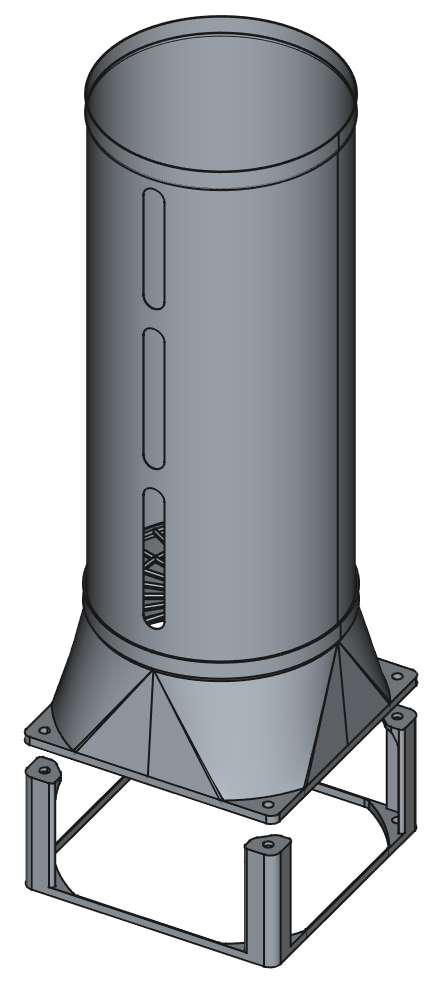
Dílky k vytištění:
Celá sestava ve formátu FreeCAD zde
Další potřebné pomůcky:
- 12cm PC ventilátor
- L298N DC Motor Driver (či dostatečně dimenzovaný tranzistor)
- Kalíšek/Papír/Míček
- Sonar module (HC-SR04)
- Micro:bit + breakout module
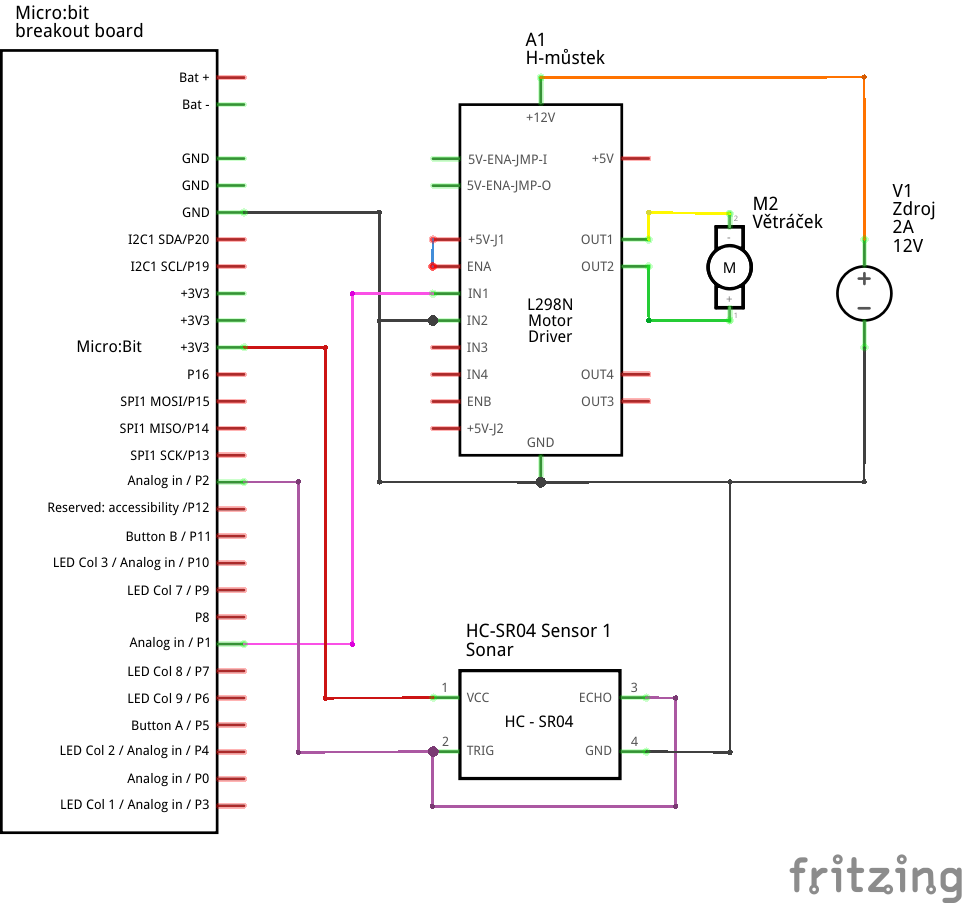
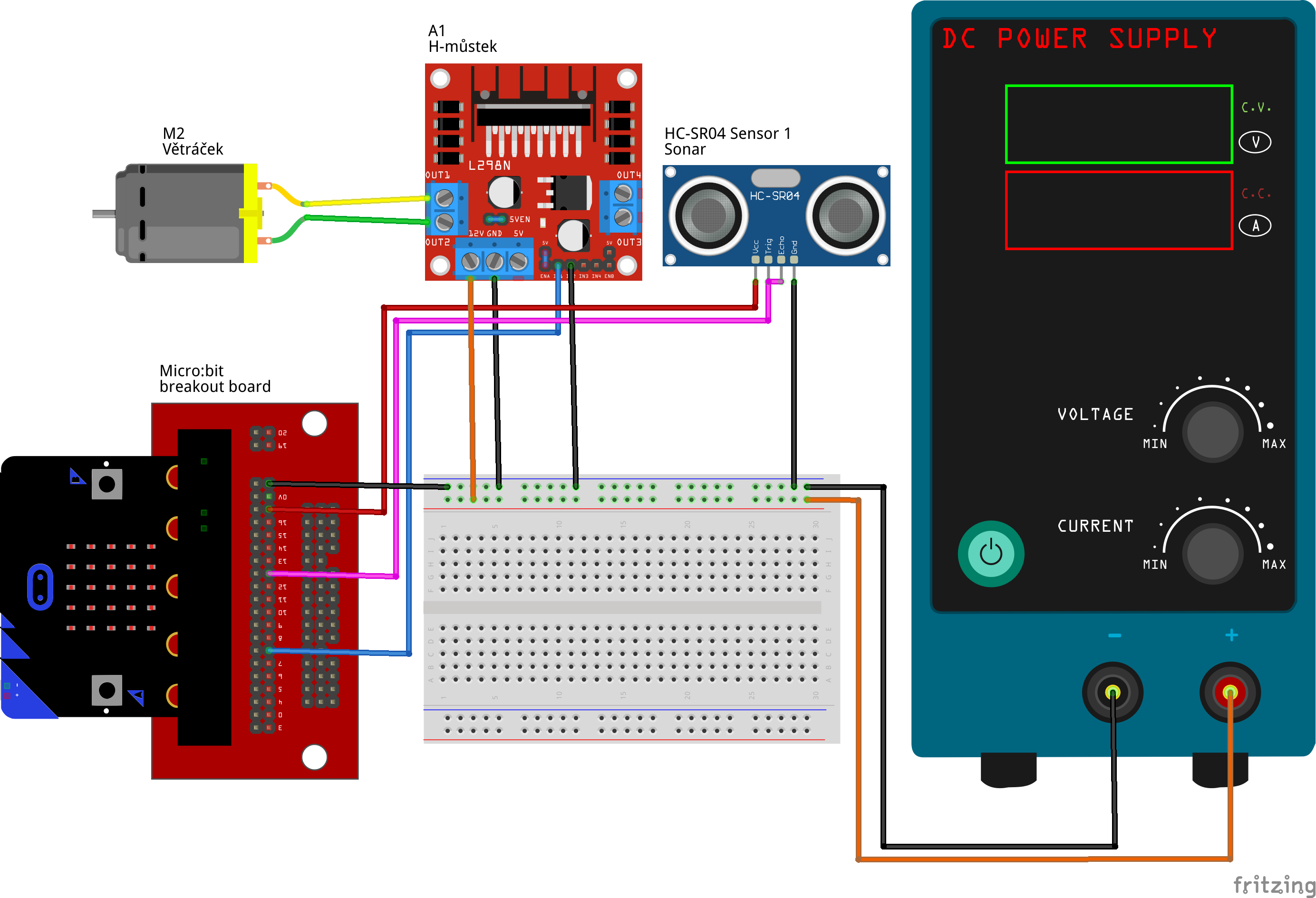
Zapojení
Na vyzkoušení stačí připojit větráček na regulovatelný zdroj a otestovat základní funkci. Cílové zapojení včetně ovládání otáček pomocí Micro:bitu a měřením vzdálenosti pomocí sonaru ve formátu Fritzing zde, či jako obrázky níže:
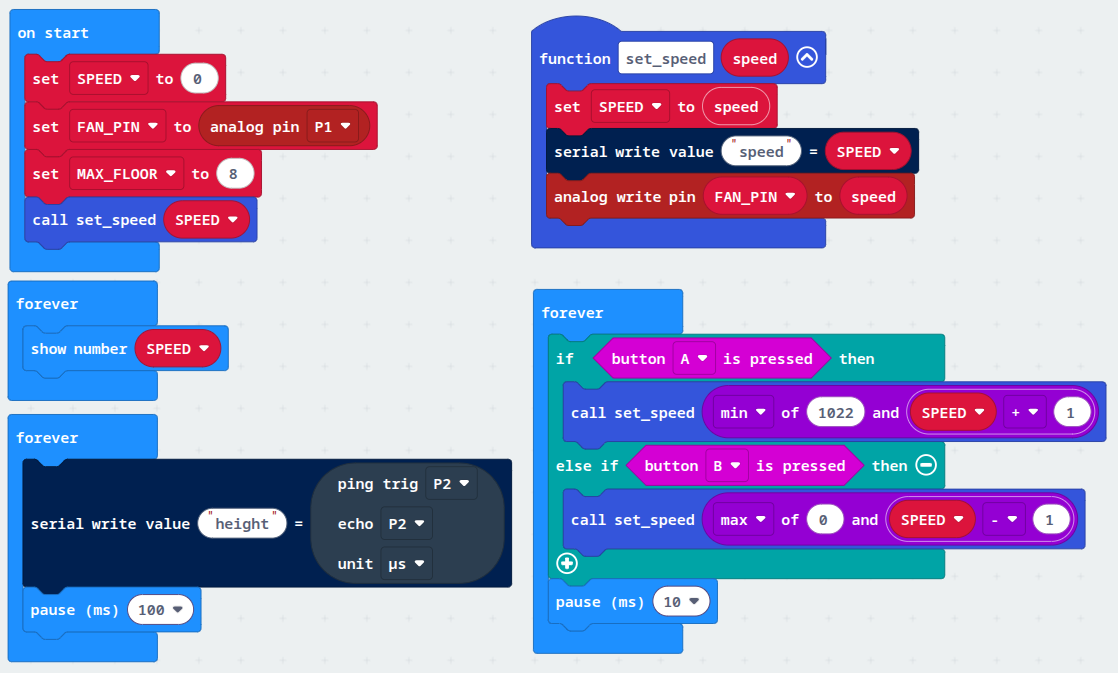
Detekce pater
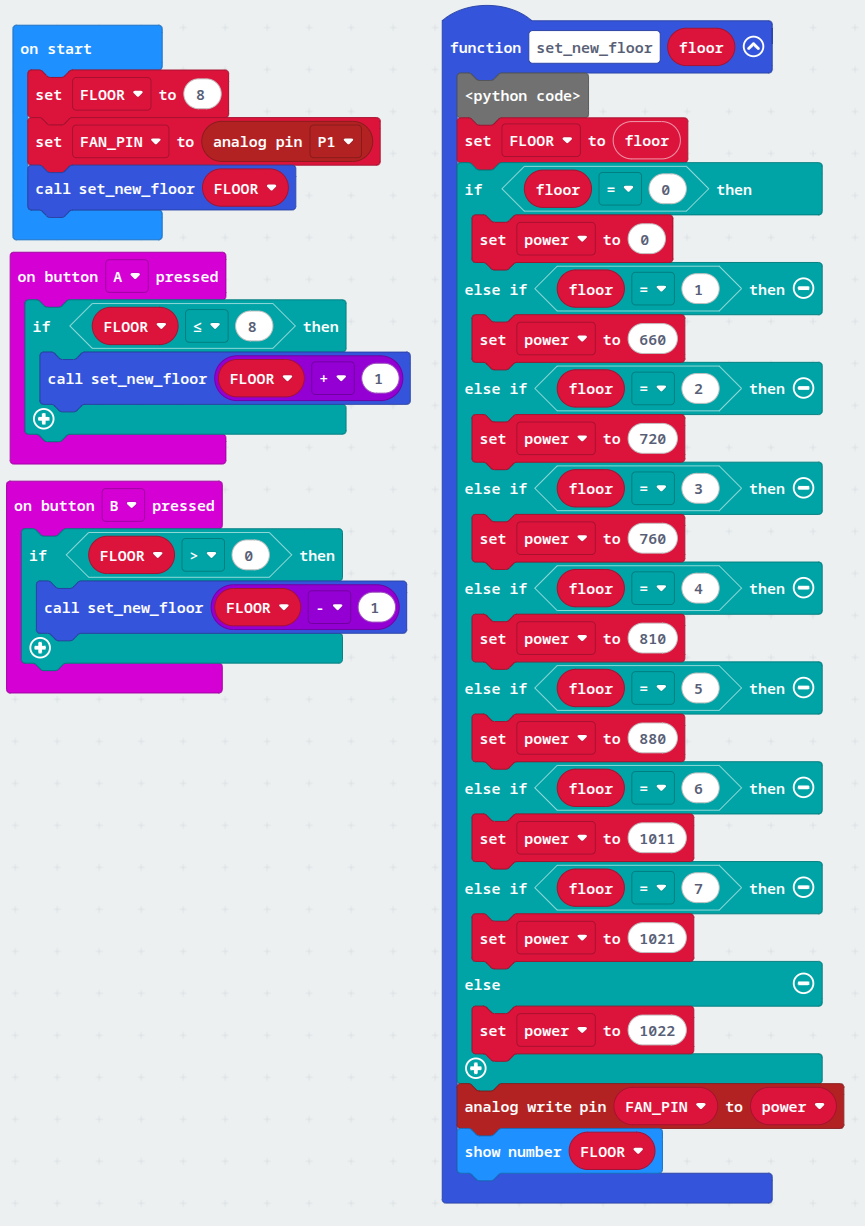
Jednoduchý prográmek pro manuální ovládání větráčku, který se hodí pro zjištění požadovaného výkonu pro určité patro, později i k měření hodnot ze senzoru vzdálenosti. Výška se zobrazí na displayi, případně je k dispozici i na sériové konzoli. Tu zobrazíme kliknutím na “Show data” pod Micro:bitem v editoru makecode.
Pomocí tlačítka “A” a “B” můžeme měnit výkon ventilátoru a přiřadit tak požadované hodnoty k jednotlivým patrům.
Všimněte si, že tlačítka “A” a “B” nejsou ovládány pomocí “on button press” ale jsou kontrolovány v nekonečné smyčce. Napadá vás proč?
Ovládání
Nyní, když už známe přibližné hodnoty výkonu větráčku můžeme naprogramovat nejjednodušší verzi bez zpětné vazby. Tlačítky “A” a “B” zvolíme patro a pokud jsme nastavili správné hodnoty, měl by se výtah dostat do požadovaného patra.
- Co se stane, pokud změním kalíšek za jiný, nebo když “přidám” náklad?
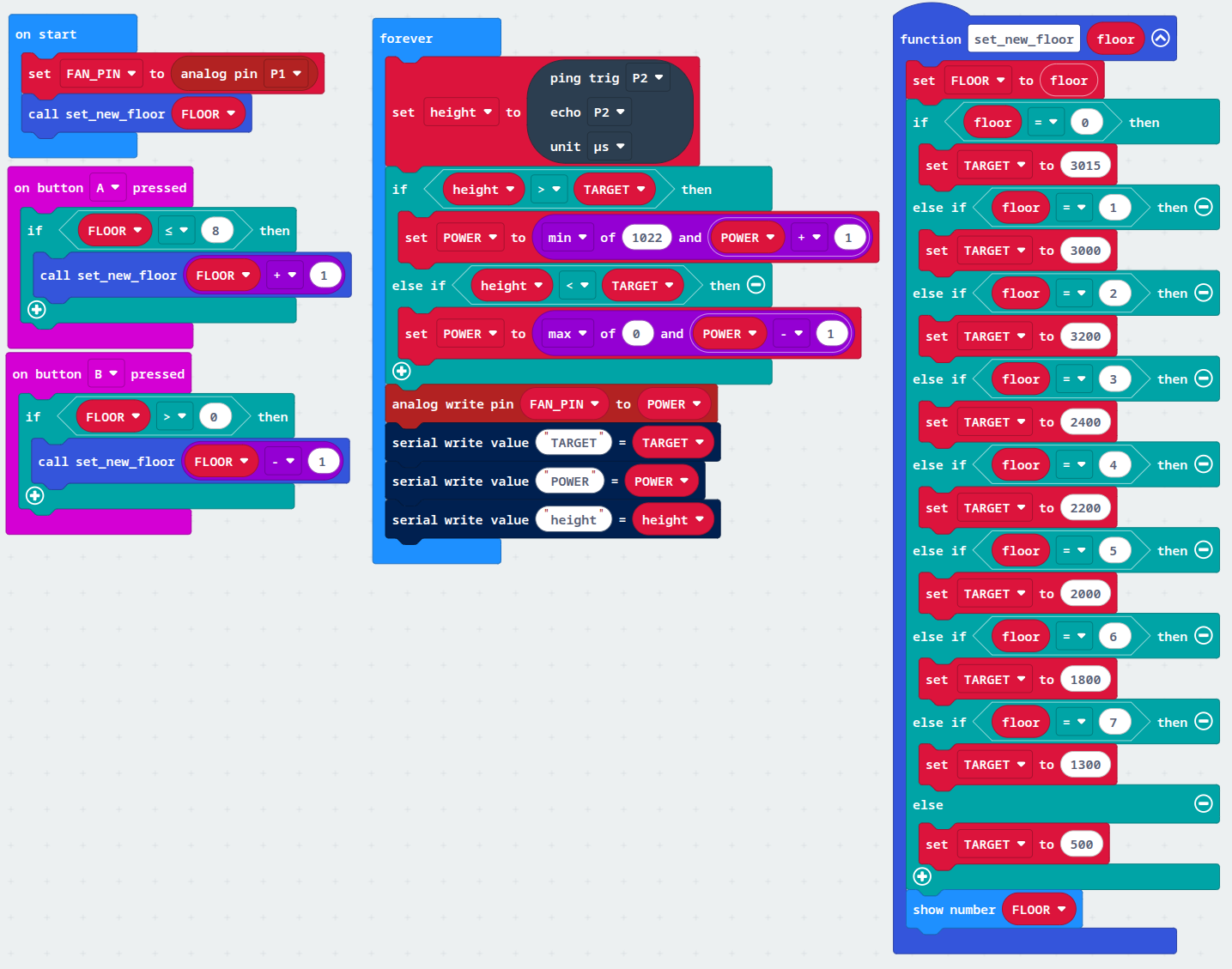
Řízení
Zpětnovazební řízení využívá zpětné vazby od senzoru vzdálenosti a snaží se neustále korigovat výkon větráčku tak, aby změřená výška odpovídala.
- Co se stane, když budeme přičítat větší čísla?
- Nešlo by to nějak vylepšit? Jak?
Řízení regulátorem PID
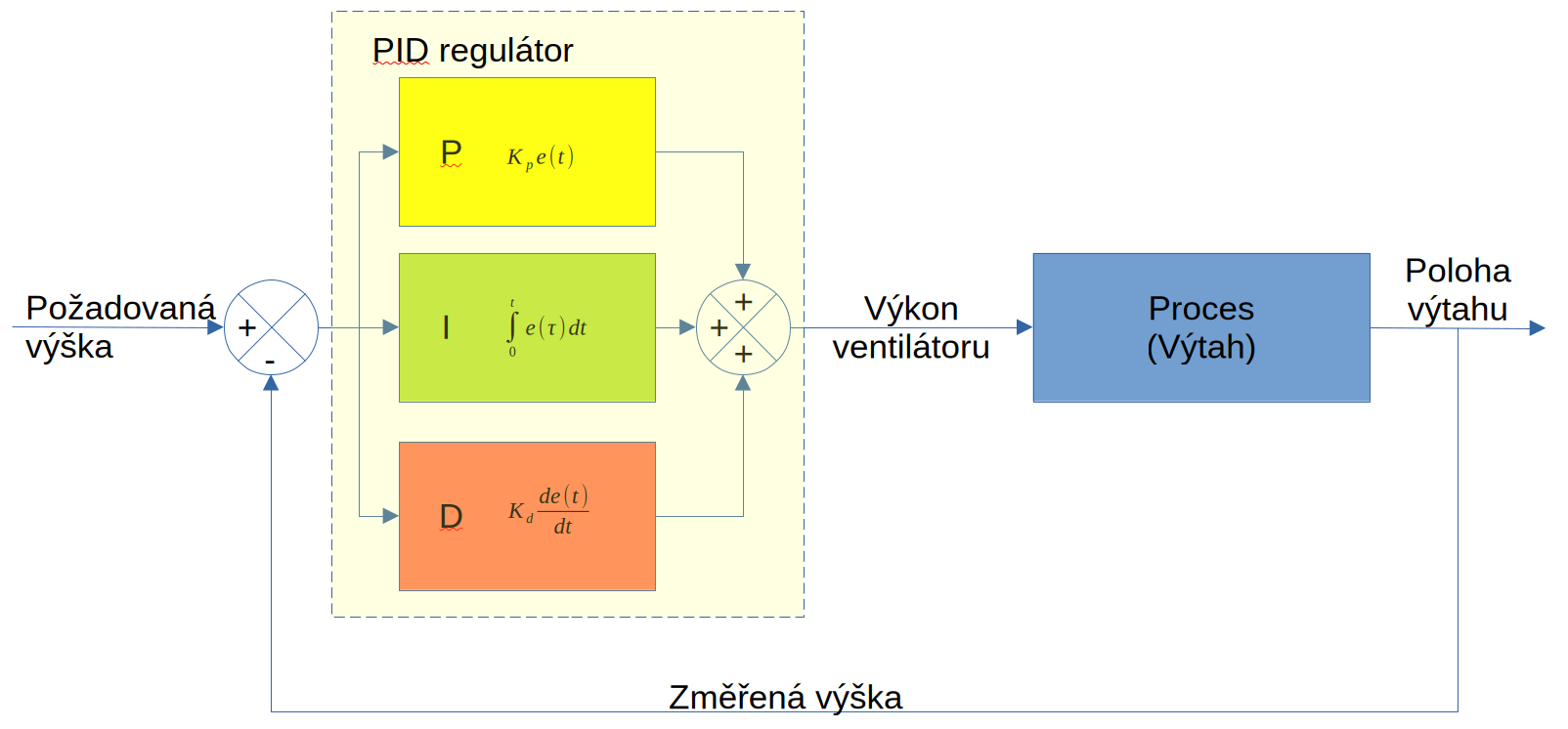
V praxi se často používají regulátory PID, které kombinují tři způsoby řízení:
- P (proporcionální) – čím větší je odchylka, tím silněji zasahuji
- I (integrační) – chybu si postupně „pamatuji“ a přičítám ji, aby se úplně odstranila
- D (derivační) – sleduji, jak rychle se chyba mění, a snažím se zabránit prudkým změnám
Případně lze říci:
- P – když jsem daleko od cíle, víc přidám
- I – když se dlouho netrefuji, postupně to doháním
- D – když se blížím moc rychle, začnu brzdit
def set_new_floor(floor: number):
global FLOOR, TARGET
FLOOR = floor
if floor == 0:
TARGET = 3015
elif floor == 1:
TARGET = 3000
elif floor == 2:
TARGET = 3200
elif floor == 3:
TARGET = 2400
elif floor == 4:
TARGET = 2200
elif floor == 5:
TARGET = 2000
elif floor == 6:
TARGET = 1800
elif floor == 7:
TARGET = 1300
else:
TARGET = 500
basic.show_number(FLOOR)
def on_button_pressed_a():
if FLOOR <= 8:
set_new_floor(FLOOR + 1)
input.on_button_pressed(Button.A, on_button_pressed_a)
def on_button_pressed_b():
if FLOOR > 0:
set_new_floor(FLOOR - 1)
input.on_button_pressed(Button.B, on_button_pressed_b)
################
# Hodnoty výtahu
################
TARGET = 0 # Požadovaná výška změřená senzorem
FLOOR = 0 # Zvolené patro výtahu
FAN_PIN = AnalogPin.P1 # Na jakém pinu je připojený větráček
###############
# PID regulátor
###############
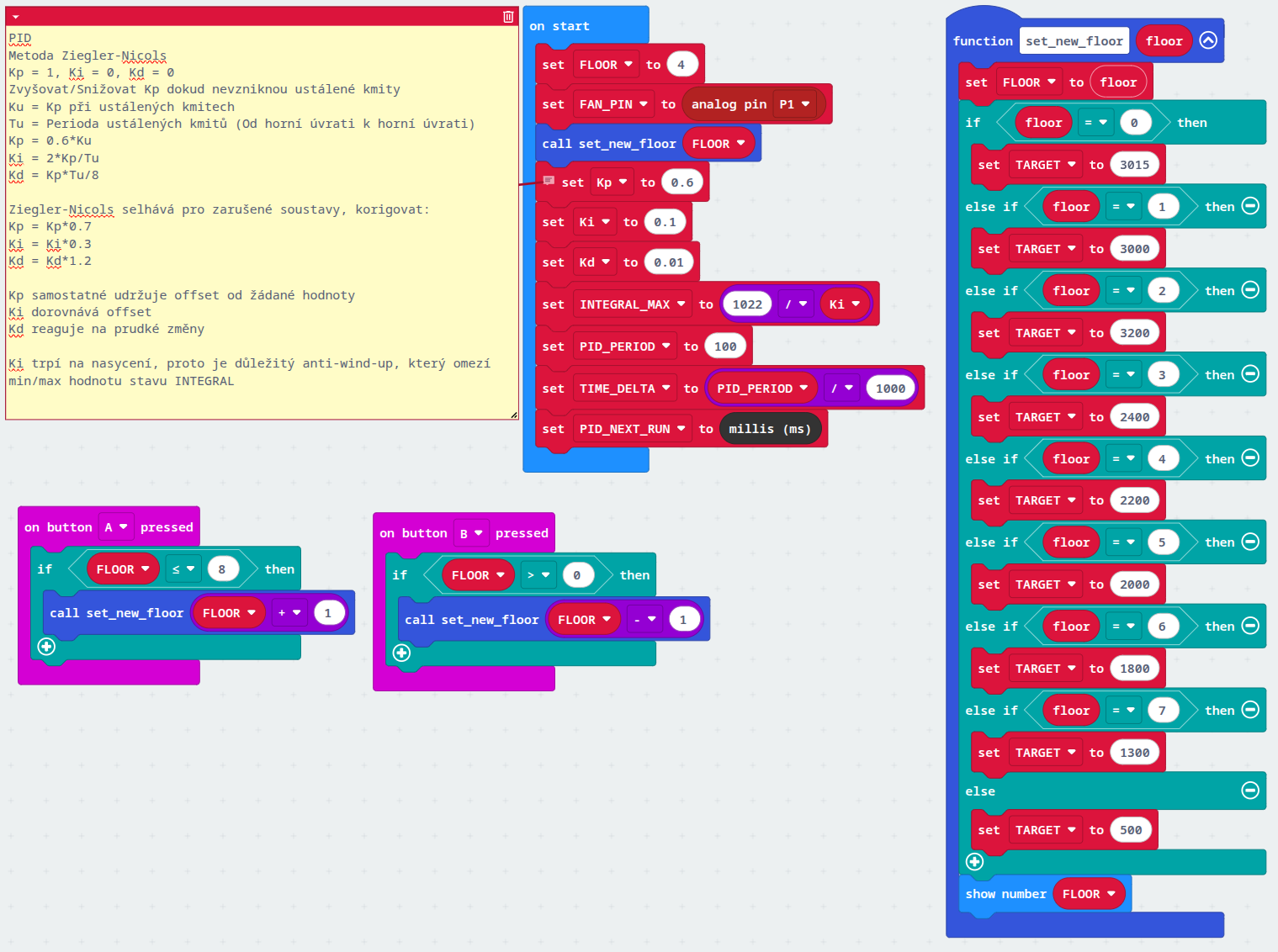
# Metoda Ziegler-Nicols
# Kp = 1, Ki = 0, Kd = 0
# Zvyšovat/Snižovat Kp dokud nevzniknou ustálené kmity
# Ku = Kp při ustálených kmitech
# Tu = Perioda ustálených kmitů (Od horní úvrati k horní úvrati)
# Kp = 0.6*Ku
# Ki = 2*Kp/Tu
# Kd = Kp*Tu/8
#
# Ziegler-Nicols selhává pro zarušené soustavy, korigovat:
# Kp = Kp*0.7
# Ki = Ki*0.3
# Kd = Kd*1.2
#
# Kp - jak silně reagujeme na aktuální chybu
# Ki - jak moc se učíme z minulých chyb
# Kd - jak moc brzdíme rychlé změny
#
# Ki trpí na nasycení, proto je důležitý anti-wind-up, který omezí
# min/max hodnotu stavu INTEGRAL
Kp = 0.6 # Výkon složky P
Ki = 0.1 # Výkon složky I
Kd = 0.01 # Výkon složky D
LAST_ERROR = 0 # Předchozí chyba
INTEGRAL = 0 # Paměť integrační složky
INTEGRAL_MAX = 1022 / Ki # Omezení integrační složky tak, aby nevystoupala do nekonečných výšin (anti-wind-up)
PID_PERIOD = 100 # Jak často bude PID regulátor reagovat na vstup
TIME_DELTA = PID_PERIOD / 1000 # Normalizace změny času
PID_NEXT_RUN = control.millis() # Kdy má příště PID regulátor běžet
set_new_floor(FLOOR) # Než začnu, nastavím hodnoty podle zvoleného poschodí FLOOR
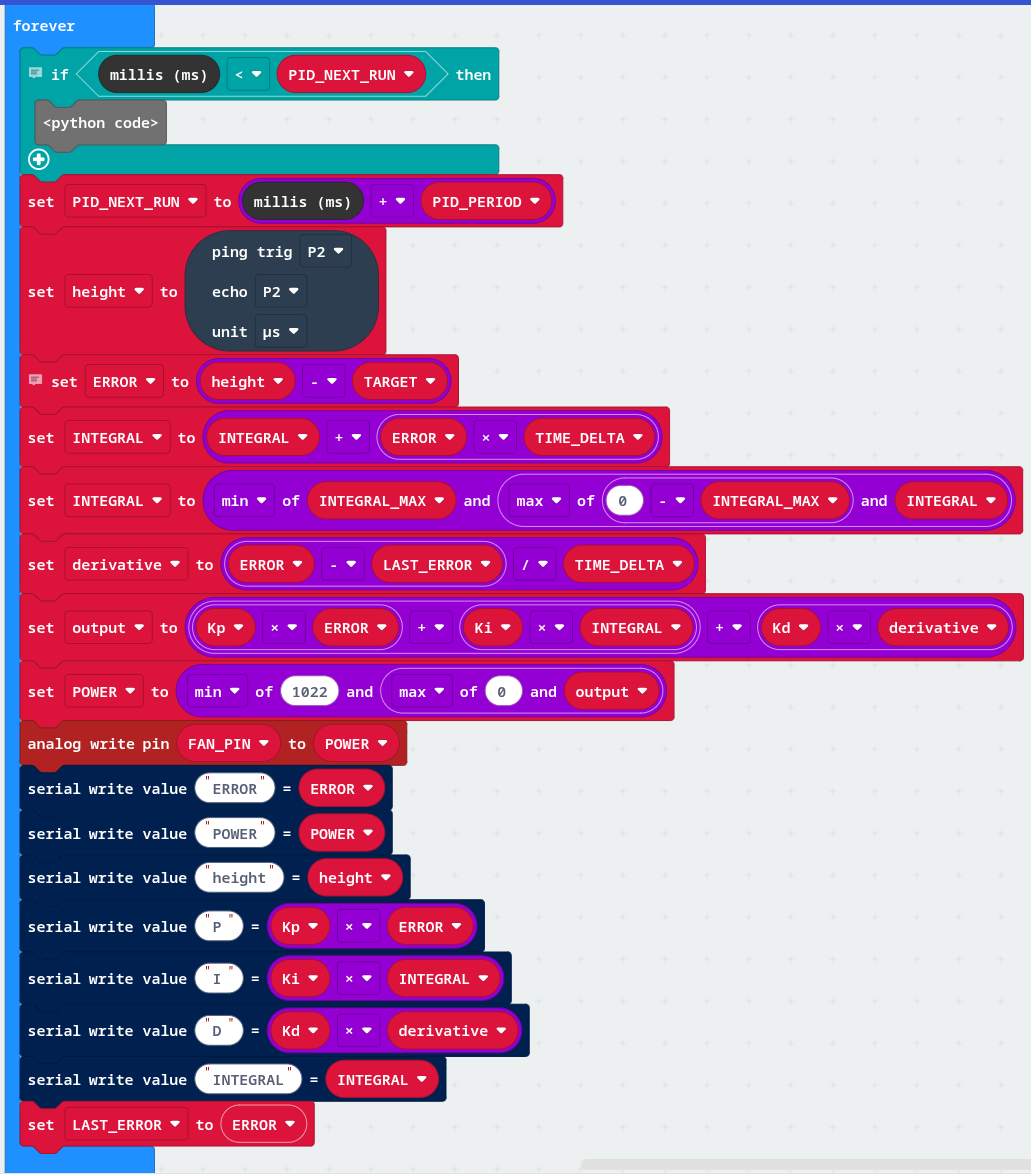
def on_forever():
# Globální proměnné které budeme přepisovat
global PID_NEXT_RUN, INTEGRAL, LAST_ERROR
# Počkej na další periodu
if control.millis() < PID_NEXT_RUN:
return
# Nejprve vypočteme kdy znovu reagovat na změnu
PID_NEXT_RUN = control.millis() + PID_PERIOD
# Změříme výšku
height = sonar.ping(DigitalPin.P2, DigitalPin.P2, PingUnit.MICRO_SECONDS)
# Přepočítáme reakci PID regulátoru
# Chyba = kde jsme teď - kde chceme být
# Výšku měříme shora, proto má chyba opačné znaménko
error = height - TARGET # error (chyba) = kde jsme teď - kde chceme být; výšku měříme shora, proto má chyba opačné znaménko (height - TARGET vs. TARGET - height)
INTEGRAL = INTEGRAL + error * TIME_DELTA # Přičteme současnou chybu do paměti
INTEGRAL = min(INTEGRAL_MAX, max(0 - INTEGRAL_MAX, INTEGRAL)) # Omezíme na rozumný rozsah (anti-wind-up)
derivative = (error - LAST_ERROR) / TIME_DELTA # Jak velká byla změna chyby od posledně normalizováno v čase
output = Kp * error + Ki * INTEGRAL + Kd * derivative # Výstup je kombinací P+I+D složek
# Omezíme výstup na hodnoty přijatelné pro náš větráček
# Maximální hodnota je teoreticky 1023, ale rozdíl mezi 1022 a 1023 je v našem případě tak
# velký, že omezíme maximální výkon na stále-ještě-analogovou hodnotu 1022.
power = min(1022, max(0, output))
pins.analog_write_pin(FAN_PIN, power) # Změň hodnotu výstupu (využívá PWM - pulzní modulaci)
# Debug výstup hodnot na sériovou konzoli
serial.write_value("error", error)
serial.write_value("POWER", power)
serial.write_value("height", height)
serial.write_value("P", Kp * error)
serial.write_value("I", Ki * INTEGRAL)
serial.write_value("D", Kd * derivative)
serial.write_value("INTEGRAL", INTEGRAL)
# Jako poslední si uložíme odchylku jako předchozí známou hodnotu
LAST_ERROR = error
basic.forever(on_forever)